
News Express: UM makes new discoveries in biomimetic finger for tactile perception
新聞快訊:澳大在仿生指尖觸覺感知研究有新發現
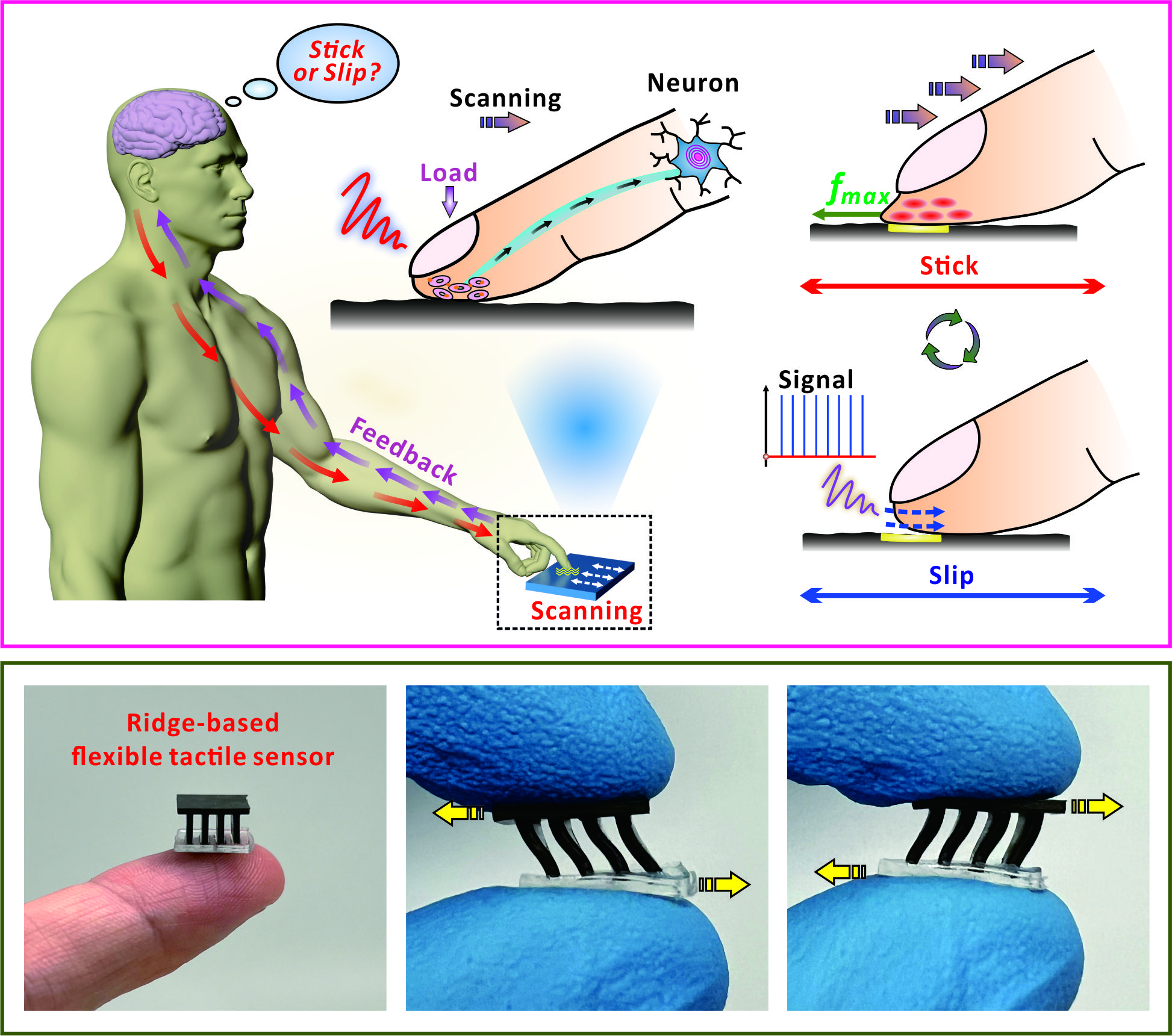
人類手指滑過表面的“黏—滑”過程示意圖及仿生觸覺傳感器實物圖
A schematic of the ‘stick-slip’ process when a finger scans across a surface and real images of the bionic tactile sensor
澳大在仿生指尖觸覺感知研究有新發現
澳門大學應用物理及材料工程研究院副教授周冰樸的研究團隊設計出一種基於電磁感應的柔性觸覺傳感器,可模擬人類手指滑過表面時的“黏—滑”現象,對觸覺反饋及軟體機器人等新興仿生器件的設計具有重要的指導意義。相關研究成果已於國際知名期刊《先進材料》刊登。
生活中,人類常常通過指尖掃描表面的動作,來感知表面粗糙度、黏附、潤濕、摩擦等基本特性;其中,“黏—滑”行為扮演著重要的角色。該現象的原理在於手指滑過表面時,皮膚和表面之間的動、靜摩擦力差異使皮膚產生周期性的切向形變及快速恢復,觸覺神經則進一步將該動態過程編碼為神經電信號傳遞給大腦。由於滑動過程中皮膚的形變與界面特性息息相關,大腦則可依據信號來判斷“黏—滑”現象,從而實現對表面性質的感知。如何完整復刻指尖掃過表面時的剪切形變並轉化為可識別的有效信息,目前仍是一大挑戰。
為此,研究團隊從電磁感應的原理出發,巧妙地設計一種“脊狀”三明治柔性結構,可真實模擬指尖掃過表面時皮膚的切向變形及動態恢復過程。通過內嵌磁性軟材料,該動態形變則可帶來空間磁通量的快速改變,從而在柔性導電線圈中激發感應電流(脈衝信號)來實時反饋器件的形變狀態。一方面,該研究模擬及重現了手指掃描過程中如壓力、速度等參數對感知能力的影響;另一方面,研究團隊亦系統地探索了“黏—滑”這一動態行為與粗糙程度、起伏結構、界面潤濕等表面信息的內在聯繫。該柔性傳感平台既有利於進一步深入了解日常生活中的“黏—滑”行為,亦對觸覺反饋及軟體機器人等新興仿生器件的設計具有重要的指導意義。
是次研究的通訊作者為周冰樸,第一作者為澳大應用物理及材料工程研究院博士生方丹。研究由澳門特別行政區科學技術發展基金(檔案編號:0057/2023/RIB2)、廣東省科學技術廳(檔案編號:2022A0505030024)和澳門大學(檔案編號:MYRG-GRG2024-00090-IAPME)資助。全文可瀏覽:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202417867。
欲瀏覽官網版可登入以下連結:
https://www.um.edu.mo/zh-hant/news-and-press-releases/press-release/detail/60772/
UM makes new discoveries in biomimetic finger for tactile perception
A research team led by Zhou Bingpu, associate professor in the Institute of Applied Physics and Materials Engineering (IAPME) at the University of Macau (UM), has designed a flexible tactile sensor based on the principle of electromagnetic induction. The sensor can simulate the ‘stick-slip’ phenomenon experienced when a human finger scans across a surface, providing significant insights for the design of tactile feedback systems and emerging biomimetic devices such as soft robots. The research has been published in the internationally renowned journal Advanced Materials.
In daily life, humans often scan surfaces with their fingertips to perceive basic properties such as roughness, adhesion, wetting, and friction, where the ‘stick-slip’ behaviour plays an important role. This phenomenon arises from the difference in dynamic and static friction between the skin and the surface as the finger slides over a surface, resulting in periodic tangential deformation and rapid recovery of the skin. The tactile neurons further encode this dynamic process into neural signals and transmit them to the brain. As the skin deformation during sliding is closely related to the interfacial properties, the brain can interpret the ‘stick-slip’ phenomenon based on these signals, thereby enabling the perception of surface properties. However, it remains a challenge to fully replicate the shear deformation as the fingertip scans across the surface and convert it into recognisable information.
In this study, the research team designed a novel ‘ridge-based’ flexible sandwich structure based on the principle of electromagnetic induction, which can simulate the tangential deformation and dynamic recovery process of the skin when fingertips sweep across a surface. By embedding soft magnetised materials, the dynamic deformation produces rapid changes in spatial magnetic flux, thereby exciting an induced current (pulse signals) in a flexible conductive coil to provide real-time feedback on the deformation state of the device. On one hand, the study simulated and reproduced the effects of parameters such as pressure and speed on perception during fingertip scanning. On the other hand, the research team systematically explored the intrinsic connections between the dynamic behaviour of ‘stick-slip’ and surface information such as roughness, topological structure, and surface wetting. This flexible sensing platform is not only invaluable for further understanding ‘stick-slip’ behaviour in daily life, but also has important implications for the design of tactile feedback systems and emerging biomimetic devices such as soft robots.
The corresponding author of this study is Prof Zhou, and the first author is Fang Dan, a PhD student in IAPME. The research was funded by the Science and Technology Development Fund of the Macao SAR (File No.: 0057/2023/RIB2), Department of Science and Technology of Guangdong Province (File No.: 2022A0505030024), and UM (File No.: MYRG-GRG2024-00090-IAPME). The full text of the research article is available at: https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202417867.
To read the news on UM’s official website, please visit the following link:
https://www.um.edu.mo/news-and-press-releases/press-release/detail/60772/